Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 131 results for "Christian Ringle" clear search
Perceived Scientific Value and Impact Factor
Davide Secchi Stephen J Cowley | Published Wednesday, April 12, 2017 | Last modified Monday, January 29, 2018The model explores the impact of journal metrics (e.g., the notorious impact factor) on the perception that academics have of an article’s scientific value.
Peer reviewed COMMAND-AND-CONTROL
Farzaneh Davari | Published Tuesday, September 10, 2019 | Last modified Thursday, September 12, 2019The command and control policy in natural resource management, including water resources, is a longstanding established policy that has been theoretically and practically argued from the point of view of social-ecological complex systems. With the intention of making a system ecologically resilient, these days, policymakers apply the top-down policies of controlling communities through regulations. To explore how these policies may work and to understand whether the ecological goal can be achieved via command and control policy, this research uses the capacity of Agent-Based Modeling (ABM) as an experimental platform in the Urmia Lake Basin (ULB) in Iran, which is a social-ecological complex system and has gone through a drought process.
Despite the uncertainty of the restorability capacity of the lake, there has been a consensus on the possibility to artificially restore the lake through the nationally managed Urmia Lake Restoratoin Program (ULRP). To reduce water consumption in the Basin, the ULRP widely targets the agricultural sector and proposes the project of changing crop patterns from high-water-demand (HWD) to low-water-demand (LWD), which includes a component to control water consumption by establishing water-police forces.
Using a wide range of multidisciplinary studies about Urmia Lake at the Basin and sub-basins as well as qualitative information at micro-level as the main conceptual sources for the ABM, the findings under different strategies indicate that targeting crop patterns change by legally limiting farmers’ access to water could force farmers to change their crop patterns for a short period of time as long as the number of police constantly increases. However, it is not a sustainable policy for either changing the crop patterns nor restoring the lake.
An ABM of historic British milk consumption
Matthew Gibson | Published Monday, December 20, 2021Substitution of food products will be key to realising widespread adoption of sustainable diets. We present an agent-based model of decision-making and influences on food choice, and apply it to historically observed trends of British whole and skimmed (including semi) milk consumption from 1974 to 2005. We aim to give a plausible representation of milk choice substitution, and test different mechanisms of choice consideration. Agents are consumers that perceive information regarding the two milk choices, and hold values that inform their position on the health and environmental impact of those choices. Habit, social influence and post-decision evaluation are modelled. Representative survey data on human values and long-running public concerns empirically inform the model. An experiment was run to compare two model variants by how they perform in reproducing these trends. This was measured by recording mean weekly milk consumption per person. The variants differed in how agents became disposed to consider alternative milk choices. One followed a threshold approach, the other was probability based. All other model aspects remained unchanged. An optimisation exercise via an evolutionary algorithm was used to calibrate the model variants independently to observed data. Following calibration, uncertainty and global variance-based temporal sensitivity analysis were conducted. Both model variants were able to reproduce the general pattern of historical milk consumption, however, the probability-based approach gave a closer fit to the observed data, but over a wider range of uncertainty. This responds to, and further highlights, the need for research that looks at, and compares, different models of human decision-making in agent-based and simulation models. This study is the first to present an agent-based modelling of food choice substitution in the context of British milk consumption. It can serve as a valuable pre-curser to the modelling of dietary shift and sustainable product substitution to plant-based alternatives in Britain.
Modeling a Victim-Centered Approach for Detection of Human Trafficking Victims within Migration Flows
Kyle Ballard Brant M Horio | Published Saturday, September 23, 2017The model employs an agent-based model for exploring the victim-centered approach to identifying human trafficking and the approach’s effectiveness in an abstract representation of migrant flows.
Animal territory formation (Reusable Building Block RBB)
Volker Grimm Stephanie Kramer-Schadt Robert Zakrzewski | Published Sunday, November 12, 2023This is a generic sub-model of animal territory formation. It is meant to be a reusable building block, but not in the plug-and-play sense, as amendments are likely to be needed depending on the species and region. The sub-model comprises a grid of cells, reprenting the landscape. Each cell has a “quality” value, which quantifies the amount of resources provided for a territory owner, for example a tiger. “Quality” could be prey density, shelter, or just space. Animals are located randomly in the landscape and add grid cells to their intial cell until the sum of the quality of all their cells meets their needs. If a potential new cell to be added is owned by another animal, competition takes place. The quality values are static, and the model does not include demography, i.e. mortality, mating, reproduction. Also, movement within a territory is not represented.
Benchmark for DMASON
Andreu Moreno Vendrell Josep Jorba Eduardo César Anna Sikora Cristina Peralta Quesada | Published Friday, November 22, 2024Agent-based modeling and simulation (ABMS) is a class of computational models for simulating the actions and interactions of autonomous agents with the goal of assessing their effects on a system as a whole. Several frameworks for generating parallel ABMS applications have been developed taking advantage of their common characteristics, but there is a lack of a general benchmark for comparing the performance of generated applications. We propose and design a benchmark that takes into consideration the most common characteristics of this type of applications and includes parameters for influencing their relevant performance aspects. We provide an initial implementation of the benchmark for DMASON parallel ABMS platform, and we use it for comparing the applications generated by these platforms.
Exploring social psychology theory for modelling farmer decision-making
James Millington | Published Tuesday, September 18, 2012 | Last modified Saturday, April 27, 2013To investigate the potential of using Social Psychology Theory in ABMs of natural resource use and show proof of concept, we present an exemplary agent-based modelling framework that explicitly represents multiple and hierarchical agent self-concepts
Zensei Wago: A Wealth-Integrated Social Capital Model
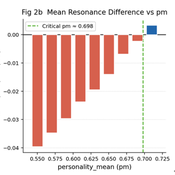
hiiki | Published Friday, May 15, 2026Interest-based compound economies generate monotonically increasing wealth inequality through multiplicative accumulation dynamics, yet the conditions under which gift-based reciprocal exchange outperforms such systems in collective well-being remain unquantified. We present Zensei Wago (全生和合), a seven-layer agent-based model comparing a Gift Resource Circulation (GRC) economy with a Compound Interest Circulation (CIC) economy under identical initial conditions. Across N = 5000 Monte Carlo replications (T = 700 ticks, N = 100 agents), GRC produced significantly higher collective resonance than CIC (p < 0.001, Cohen’s d = +0.171), above a critical prosocial threshold pm ≈ 0.698. Cohen’s d grows monotonically with duration — d = +1.943 at T = 1500 and d = +4.126 at T = 3000 — driven primarily by structural collapse of CIC resonance as inequality exceeds a critical Gini threshold (G > 0.333), while GRC resonance remains stable. The gift mechanism further decouples collective well-being from distributional outcomes, generating resonance through relational quality rather than material redistribution. Network topology analysis across seven configurations — combining a Watts-Strogatz rewiring sweep and a T = 1500 longitudinal replication — reveals that ring topology maximises GRC advantage (d = +1.17), that most topology-dependent reversals are transient (sparse and small-world both transition to significantly positive by T = 1500), and that a critical rewiring threshold of p ≈ 0.10–0.20 separates GRC-advantaged from GRC-disadvantaged network configurations. Scale-free networks remain persistently adverse (d = -7.24*), requiring structural redesign for gift-economy viability.
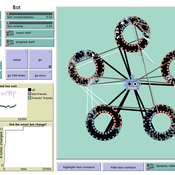
How do bots influence beliefs on social media? Why do beliefs propagated by social bots spread far and wide, yet does their direct influence appear to be limited?
This model extends Axelrod’s model for the dissemination of culture (1997), with a social bot agent–an agent who only sends information and cannot be influenced themselves. The basic network is a ring network with N agents connected to k nearest neighbors. The agents have a cultural profile with F features and Q traits per feature. When two agents interact, the sending agent sends the trait of a randomly chosen feature to the receiving agent, who adopts this trait with a probability equal to their similarity. To this network, we add a bot agents who is given a unique trait on the first feature and is connected to a proportion of the agents in the model equal to ‘bot-connectedness’. At each timestep, the bot is chosen to spread one of its traits to its neighbors with a probility equal to ‘bot-activity’.
The main finding in this model is that, generally, bot activity and bot connectedness are both negatively related to the success of the bot in spreading its unique message, in equilibrium. The mechanism is that very active and well connected bots quickly influence their direct contacts, who then grow too dissimilar from the bot’s indirect contacts to quickly, preventing indirect influence. A less active and less connected bot leaves more space for indirect influence to occur, and is therefore more successful in the long run.

A land-use model to illustrate ambiguity in design
Julia Schindler | Published Monday, October 15, 2012 | Last modified Friday, January 13, 2017This is an agent-based model that allows to test alternative designs for three model components. The model was built using the LUDAS design strategy, while each alternative is in line with the strategy. Using the model, it can be shown that alternative designs, though built on the same strategy, lead to different land-use patterns over time.
Displaying 10 of 131 results for "Christian Ringle" clear search