Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 1132 results for "Oto Hudec" clear search
A Toy Model for the Abilene Paradox
Victor Sahin | Published Monday, June 17, 2019 | Last modified Sunday, July 14, 2019This version adds a Maslowian entropy to each agent decision based on Kendrick et. al. Rudimentary implementation assumes agents with lower scores are more likely to make decisions autonomously rather than sociotropically.
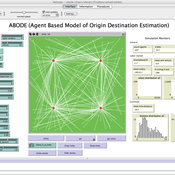
ABODE - Agent Based Model of Origin Destination Estimation
D Levinson | Published Monday, August 29, 2011 | Last modified Saturday, April 27, 2013The agent based model matches origins and destinations using employment search methods at the individual level.

Peer Review with Multiple Reviewers
Flaminio Squazzoni Federico Bianchi | Published Thursday, September 10, 2015This ABM looks at the effect of multiple reviewers and their behavior on the quality and efficiency of peer review. It models a community of scientists who alternatively act as “author” or “reviewer” at each turn.
Agent-based simulation of small group decision-making under no communication
Christopher Poile | Published Thursday, May 26, 2016A computational model of a classic small group study by Alex Bavelas. This computational model was designed to explore the difficulty in translating a seemingly simple real-world experiment into a computational model.
How does knowledge infrastructure mobilization influence the safe operating space of regulated exploited ecosystems?
Jean-Denis Mathias | Published Tuesday, July 17, 2018Decision-makers often have to act before critical times to avoid the collapse of ecosystems using knowledge \textcolor{red}{that can be incomplete or biased}. Adaptive management may help managers tackle such issues. However, because the knowledge infrastructure required for adaptive management may be mobilized in several ways, we study the quality and the quantity of knowledge provided by this knowledge infrastructure. In order to analyze the influence of mobilized knowledge, we study how the following typology of knowledge and its use may impact the safe operating space of exploited ecosystems: 1) knowledge of the past based on a time series distorted by measurement errors; 2) knowledge of the current systems’ dynamics based on the representativeness of the decision-makers’ mental models of the exploited ecosystem; 3) knowledge of future events based on decision-makers’ likelihood estimates of extreme events based on modeling infrastructure (models and experts to interpret them) they have at their disposal. We consider different adaptive management strategies of a general regulated exploited ecosystem model and we characterize the robustness of these strategies to biased knowledge. Our results show that even with significant mobilized knowledge and optimal strategies, imperfect knowledge may still shrink the safe operating space of the system leading to the collapse of the system. However, and perhaps more interestingly, we also show that in some cases imperfect knowledge may unexpectedly increase the safe operating space by suggesting cautious strategies.
The code enables to calculate the safe operating spaces of different managers in the case of biased and unbiased knowledge.
Can ethnic tolerance curb self-reinforcing school segregation? A theoretical Agent Based Model
Lucas Sage Andreas Flache | Published Monday, August 10, 2020Schelling and Sakoda prominently proposed computational models suggesting that strong ethnic residential segregation can be the unintended outcome of a self-reinforcing dynamic driven by choices of individuals with rather tolerant ethnic preferences. There are only few attempts to apply this view to school choice, another important arena in which ethnic segregation occurs. In the current paper, we explore with an agent-based theoretical model similar to those proposed for residential segregation, how ethnic tolerance among parents can affect the level of school segregation. More specifically, we ask whether and under which conditions school segregation could be reduced if more parents hold tolerant ethnic preferences. We move beyond earlier models of school segregation in three ways. First, we model individual school choices using a random utility discrete choice approach. Second, we vary the pattern of ethnic segregation in the residential context of school choices systematically, comparing residential maps in which segregation is unrelated to parents’ level of tolerance to residential maps reflecting their ethnic preferences. Third, we introduce heterogeneity in tolerance levels among parents belonging to the same group. Our simulation experiments suggest that ethnic school segregation can be a very robust phenomenon, occurring even when about half of the population prefers mixed to segregated schools. However, we also identify a “sweet spot” in the parameter space in which a larger proportion of tolerant parents makes the biggest difference. This is the case when parents have moderate preferences for nearby schools and there is only little residential segregation. Further experiments are presented that unravel the underlying mechanisms.
UK Demographic Simulator
Tony Lawson | Published Monday, February 27, 2012 | Last modified Tuesday, October 21, 2014A dynmaic microsimulation model to project the UK population over time
Coalitions in Networked Innovation
Rory Sie Peter Sloep Marlies Bitter-Rijpkema | Published Tuesday, February 11, 2014A first version of a model that describes how coalitions are formed during open, networked innovation

Peer reviewed AgentEx
Nanda Wijermans Maja Schlüter Caroline Schill Therese Lindahl | Published Sunday, November 13, 2016AgentEx aims to advance understanding of group processes for sustainable management of a common pool resource (CPR). By supporting the development and test explanations of cooperation and sustainable exploitation.
TREELIM
Gudrun Wallentin | Published Wednesday, November 30, 2016 | Last modified Tuesday, January 10, 2017The model simulates the spatial patterns of secondary forest succession above the current alpine tree line in the context of land use and climate change. Three scenarios are offered: (1) climate change, (2) land use change, (3) species composition.
Displaying 10 of 1132 results for "Oto Hudec" clear search