NOMAD: Near–Off Mobility under Aspiration Dynamics 1.0.0
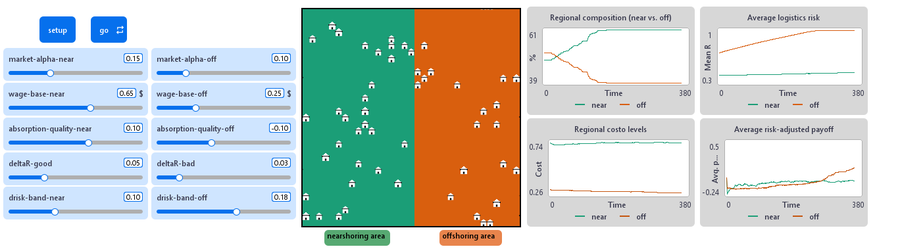
NOMAD is an agent-based model of firm location choice between two aggregate regions (“near” and “off”) under logistics uncertainty. Firms occupy sites characterised by attractiveness and logistics risk, earn a risk-adjusted payoff that depends on regional costs (wages plus congestion) and an individual risk-tolerance trait, and update location choices using aspiration-based satisficing rules with switching frictions. Logistics risk evolves endogenously on occupied sites through a region-specific absorption mechanism (good/bad events that reduce/increase risk), while congestion feeds back into regional costs via regional shares and local crowding. Runs stop endogenously once the near-region share becomes quasi-stable after burn-in, and the model records time series and quasi-stable outcomes such as near/off composition, switching intensity, costs, average risk, and average risk tolerance.
Release Notes
This version includes the full two-region environment, patch-level attractiveness and logistics-risk attributes, aspiration-based location updating with within-region exploration and inter-regional switching frictions, endogenous logistics-risk absorption dynamics, congestion-based regional cost feedbacks, adaptive risk-tolerance learning, and an endogenous stopping rule that detects quasi-stable near/off configurations after burn-in.